
NVIDIA JetPack on Ubuntu Server 22.04¶
Install NVIDIA proprietary software¶
The Ubuntu image brings anything necessary to boot Linux on a Jetson development kit. However, to unlock the features of the Orin’s SoC (wireless network, bluetooth, GPU, …) you can install additional NVIDIA proprietary drivers and libraries using a Launchpad PPA :
sudo add-apt-repository ppa:ubuntu-tegra/updates
# Install Tegra firmwares and necessary NVIDIA libraries
sudo apt install -y nvidia-tegra-drivers-36
# Adding user to group render allows running GPU related commands as non root
# video group is necessary to use the camera
sudo usermod -a -G render,video ubuntu
sudo reboot
Install CUDA and TensorRT¶
SDKs like CUDA Toolkit and TensorRT that allow building AI applications on Jetson devices are available directly from NVIDIA:
# CUDA
sudo apt-key adv --fetch-keys "https://repo.download.nvidia.com/jetson/jetson-ota-public.asc"
sudo add-apt-repository -y "deb https://repo.download.nvidia.com/jetson/t234 r36.4 main"
sudo add-apt-repository -y "deb https://repo.download.nvidia.com/jetson/common r36.4 main"
sudo apt install -y cuda
# Tensor RT
sudo apt install -y libnvinfer-bin libnvinfer-samples
# cuda-samples dependencies
sudo apt install -y cmake
echo "export PATH=/usr/local/cuda-12.6/bin\${PATH:+:\${PATH}}" >> ~/.profile
echo "export LD_LIBRARY_PATH=/usr/local/cuda-12.6/lib64\${LD_LIBRARY_PATH:+:\${LD_LIBRARY_PATH}}" >> ~/.profile
# Logout or reboot to apply the profile change
sudo reboot
Test your system¶
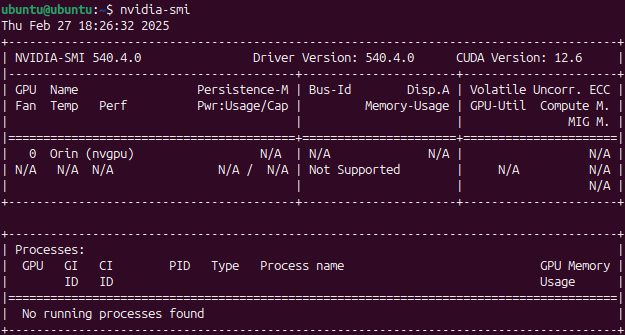
NVIDIA system management interface¶
nvidia-smi can be used to display GPU related information.
Run GPU’s sample code application¶
CUDA samples¶
You can build and run CUDA sample applications. You can start with deviceQuery, but you can also build and try many others.
git clone https://github.com/NVIDIA/cuda-samples.git -b v12.5
cd cuda-samples
cd Samples/1_Utilities/deviceQuery && make
Running this sample code should produce the following output
ubuntu@ubuntu:~/cuda-samples/Samples/1_Utilities/deviceQuery$ ./deviceQuery
./deviceQuery Starting...
CUDA Device Query (Runtime API) version (CUDART static linking)
Detected 1 CUDA Capable device(s)
Device 0: "Orin"
CUDA Driver Version / Runtime Version 12.6 / 12.6
CUDA Capability Major/Minor version number: 8.7
Total amount of global memory: 7618 MBytes (7987728384 bytes)
(004) Multiprocessors, (128) CUDA Cores/MP: 512 CUDA Cores
GPU Max Clock rate: 765 MHz (0.76 GHz)
Memory Clock rate: 612 Mhz
Memory Bus Width: 128-bit
L2 Cache Size: 2097152 bytes
Maximum Texture Dimension Size (x,y,z) 1D=(131072), 2D=(131072, 65536), 3D=(16384, 16384, 16384)
Maximum Layered 1D Texture Size, (num) layers 1D=(32768), 2048 layers
Maximum Layered 2D Texture Size, (num) layers 2D=(32768, 32768), 2048 layers
Total amount of constant memory: 65536 bytes
Total amount of shared memory per block: 49152 bytes
Total shared memory per multiprocessor: 167936 bytes
Total number of registers available per block: 65536
Warp size: 32
Maximum number of threads per multiprocessor: 1536
Maximum number of threads per block: 1024
Max dimension size of a thread block (x,y,z): (1024, 1024, 64)
Max dimension size of a grid size (x,y,z): (2147483647, 65535, 65535)
Maximum memory pitch: 2147483647 bytes
Texture alignment: 512 bytes
Concurrent copy and kernel execution: Yes with 2 copy engine(s)
Run time limit on kernels: No
Integrated GPU sharing Host Memory: Yes
Support host page-locked memory mapping: Yes
Alignment requirement for Surfaces: Yes
Device has ECC support: Disabled
Device supports Unified Addressing (UVA): Yes
Device supports Managed Memory: Yes
Device supports Compute Preemption: Yes
Supports Cooperative Kernel Launch: Yes
Supports MultiDevice Co-op Kernel Launch: Yes
Device PCI Domain ID / Bus ID / location ID: 0 / 0 / 0
Compute Mode:
< Default (multiple host threads can use ::cudaSetDevice() with device simultaneously) >
deviceQuery, CUDA Driver = CUDART, CUDA Driver Version = 12.6, CUDA Runtime Version = 12.6, NumDevs = 1
Result = PASS
TensorRT¶
mkdir ${HOME}/tensorrt-samples
ln -s /usr/src/tensorrt/data ${HOME}/tensorrt-samples/data
cp -a /usr/src/tensorrt/samples ${HOME}/tensorrt-samples/
cd ${HOME}/tensorrt-samples/samples/sampleAlgorithmSelector && make
cd ${HOME}/tensorrt-samples/bin
./sample_algorithm_selector
Camera¶
Prerequisites¶
The following commands were tested on an IMX219 camera module connected to a Nano and NX devkit.
# Allow camera stack to use the right libraries
sudo update-alternatives \
--install /etc/ld.so.conf.d/aarch64-linux-gnu_EGL.conf \
aarch64-linux-gnu_egl_conf \
/usr/lib/aarch64-linux-gnu/tegra-egl/ld.so.conf 1000
sudo update-alternatives \
--install /etc/ld.so.conf.d/aarch64-linux-gnu_GL.conf \
aarch64-linux-gnu_gl_conf \
/usr/lib/aarch64-linux-gnu/nvidia/ld.so.conf 1000
sudo ldconfig
sudo reboot
Verify the camera is detected¶
Please also refer to the NVIDIA test plan camera setup.
# Install v4l2-ctl
sudo apt install v4l-utils
v4l2-ctl --list-devices
v4l2-ctl --list-formats-ext
If your device is properly detected, the output should be close to this one:
ubuntu@ubuntu:~$ v4l2-ctl --list-devices
NVIDIA Tegra Video Input Device (platform:tegra-camrtc-ca):
/dev/media0
vi-output, imx219 10-0010 (platform:tegra-capture-vi:1):
/dev/video0
You should then be able to detect it via the NVARGUS daemon (in this example, the sensor-id is 0):
ubuntu@ubuntu:~$ nvargus_nvraw --sensorinfo --c 0
nvargus_nvraw version 1.15.0
Number of sensors 1, Number of modes for selected sensor 5
Selected sensor: jakku_front_RBP194 ID 0 Mode 0
Number of exposures 1
Index Exposure time Range Sensor Gain Range
0 0.000013 - 0.500000 1.000000 - 10.625000
Warning: Maximum value of Exposure time 0.683709 secs is more than maximum Frame duration of 0.5 secs.
Changing
Maximum Exposure time to 0.5 secs.
Capture a JPEG image with NVARGUS¶
Still with the same sensor-id
# Unset DISPLAY only if running the commands from SSH or a serial console
unset DISPLAY
nvargus_nvraw --c 0 --format jpg --file ${HOME}/frame-cam0.jpg
GStreamer¶
Pre-requisites¶
Make sure to install the necessary GStreamer packages
# Install gstreamer plugins
sudo apt install -y gstreamer1.0-tools gstreamer1.0-alsa \
gstreamer1.0-plugins-base gstreamer1.0-plugins-good \
gstreamer1.0-plugins-bad gstreamer1.0-plugins-ugly \
gstreamer1.0-libav
sudo apt install -y libgstreamer1.0-dev \
libgstreamer-plugins-base1.0-dev \
libgstreamer-plugins-good1.0-dev \
libgstreamer-plugins-bad1.0-dev
Camera capture using GStreamer¶
# Unset DISPLAY only if running the commands from SSH or a serial console
unset DISPLAY
# Capture an image
gst-launch-1.0 nvarguscamerasrc num-buffers=1 sensor-id=0 ! \
'video/x-raw(memory:NVMM), width=(int)1920, height=(int)1080,' \ 'format=(string)NV12' ! nvjpegenc ! filesink \
location=${HOME}/gst-frame-cam0.jpg
# Capturing Video from the Camera and Record
gst-launch-1.0 nvarguscamerasrc num-buffers=300 sensor-id=0 ! \
'video/x-raw(memory:NVMM), width=(int)1920, height=(int)1080,' \
'format=(string)NV12, framerate=(fraction)30/1' ! \
nvv4l2h265enc bitrate=8000000 ! h265parse ! qtmux ! \
filesink location=test.mp4
Transcode using GStreamer¶
Using a stream from the Big Buck Bunny project, you can easily test the transcoding pipelines (note that Jetson Orin Nano don’t have hardware encoders and won’t be able to run these pipelines):
sudo apt install unzip
wget -nv https://download.blender.org/demo/movies/BBB/bbb_sunflower_1080p_30fps_normal.mp4.zip
unzip -qu bbb_sunflower_1080p_30fps_normal.mp4.zip
echo "H.264 Decode (NVIDIA Accelerated Decode) to H265 encode"
gst-launch-1.0 filesrc location=bbb_sunflower_1080p_30fps_normal.mp4 ! qtdemux ! queue ! \
h264parse ! nvv4l2decoder ! nvv4l2h265enc bitrate=8000000 ! h265parse ! \
qtmux ! filesink location=h265-reenc.mp4 -e
echo "H.265 Decode (NVIDIA Accelerated Decode) to AV1 Encode (NVIDIA Accelerated Encode)"
gst-launch-1.0 filesrc location=h265-reenc.mp4 ! qtdemux ! queue ! h265parse ! nvv4l2decoder ! \
nvv4l2av1enc ! matroskamux name=mux ! filesink location=av1-reenc.mkv -e
echo "AV1 Decode (NVIDIA Accelerated Decode) to H.264 encode"
gst-launch-1.0 filesrc location=av1-reenc.mkv ! matroskademux ! queue ! nvv4l2decoder ! \
nvv4l2h264enc bitrate=20000000 ! h264parse ! queue ! qtmux name=mux ! filesink \
location=h264-reenc.mp4 -e
echo "H.264 Decode (NVIDIA Accelerated Decode) to AV1"
gst-launch-1.0 filesrc location=h264-reenc.mp4 ! qtdemux ! \
h264parse ! nvv4l2decoder ! nvv4l2av1enc ! matroskamux name=mux ! \
filesink location=av1-reenc.mkv -e
cuDNN¶
Prerequisite¶
sudo apt install cudnn libcudnn9-samples
Run cuDNN Samples¶
Build and run the Converted sample.
cd /usr/src/cudnn_samples_v9
cd conv_sample
sudo make -j8
sudo chmod +x run_conv_sample.sh
sudo ./run_conv_sample.sh
You can also try other sample applications.
NVIDIA container runtime¶
You can follow the NVIDIA container test plan to install and configure the NVIDIA Container Toolkit before running the JetPack container. Try to run a previously built CUDA sample application:
sudo docker run --rm -it -e DISPLAY --net=host --runtime \
nvidia -v /tmp/.X11-unix/:/tmp/.X11-unix -v \
${HOME}/cuda-samples:/root/cuda-samples \
nvcr.io/nvidia/l4t-jetpack:r36.3.0 \
/root/cuda-samples/Samples/1_Utilities/deviceQuery/deviceQuery
VPI¶
Prerequisites for VPI¶
Install VPI and its sample applications
sudo apt install nvidia-vpi vpi3-samples libopencv cmake libpython3-dev python3-numpy libopencv-python
Test¶
Execute steps 1 to 6 from the NVIDIA VPI test plan, for each VPI sample application.
Install the desktop environment¶
Some use cases might require a desktop environment. To turn your Ubuntu Server image into a Desktop one, with hardware accelerated rendering, run the following commands:
sudo apt install -y ubuntu-desktop-minimal
sudo sed -i 's/allowed_users.*/allowed_users=anybody/' "/etc/X11/Xwrapper.config"
echo "needs_root_rights=yes" | sudo tee -a "/etc/X11/Xwrapper.config"
sudo sed 's/#WaylandEnable=false/WaylandEnable= false/' -i /etc/gdm3/custom.conf
sudo adduser gdm video
sudo reboot